QuickSilver Servo Motors Drive Autonomous Vehicles

Interesting Projects Blog
April 16 2024 | Donald P. Labriola PE
The design of remotely operated, autonomous battery-powered vehicles places special requirements on motion control systems. High torque at low speeds is needed to climb over obstacles, while higher speed operation is needed for cruise speed. Efficient operation from lower voltages (12V to 48V) reduces battery size and weight requirements, while regenerative drives maximize the operating time and distance by recharging the batteries while braking. High torque, direct drive servo motors from QuickSilver Controls have been shown to be well suited to the motion requirements of compact battery- powered vehicles.
Vehicles based on QuickSilver Controls servos have competed well in the Intelligent Ground Vehicle Competition (IGVC) and the Civilian European Land Robotic Trials (C- ELROB). In fact, the last five winners of the IGVC (2004-2008) have all been powered by QuickSilver Controls servo systems. Central to this success are integrated controllers/digital drives which include a wide selection of velocity and distance based moves that may be reconfigured on the fly, and the ability to control motions from analog joystick inputs, as well as perform PLC level operations. Mohan Krishnan, a faculty advisor at the University of Detroit and an IGVC winner, noted that previously, companies tried to jury rig solutions with encoders or other control systems that run under their processor. These solutions would employ a control rig that would take a lot of processing power. Krishnan said, “In the past 2 to 3 years, we have migrated to a modular integrated motor/gearbox/controller design so that we could then concentrate on other critical aspects of the vehicle.
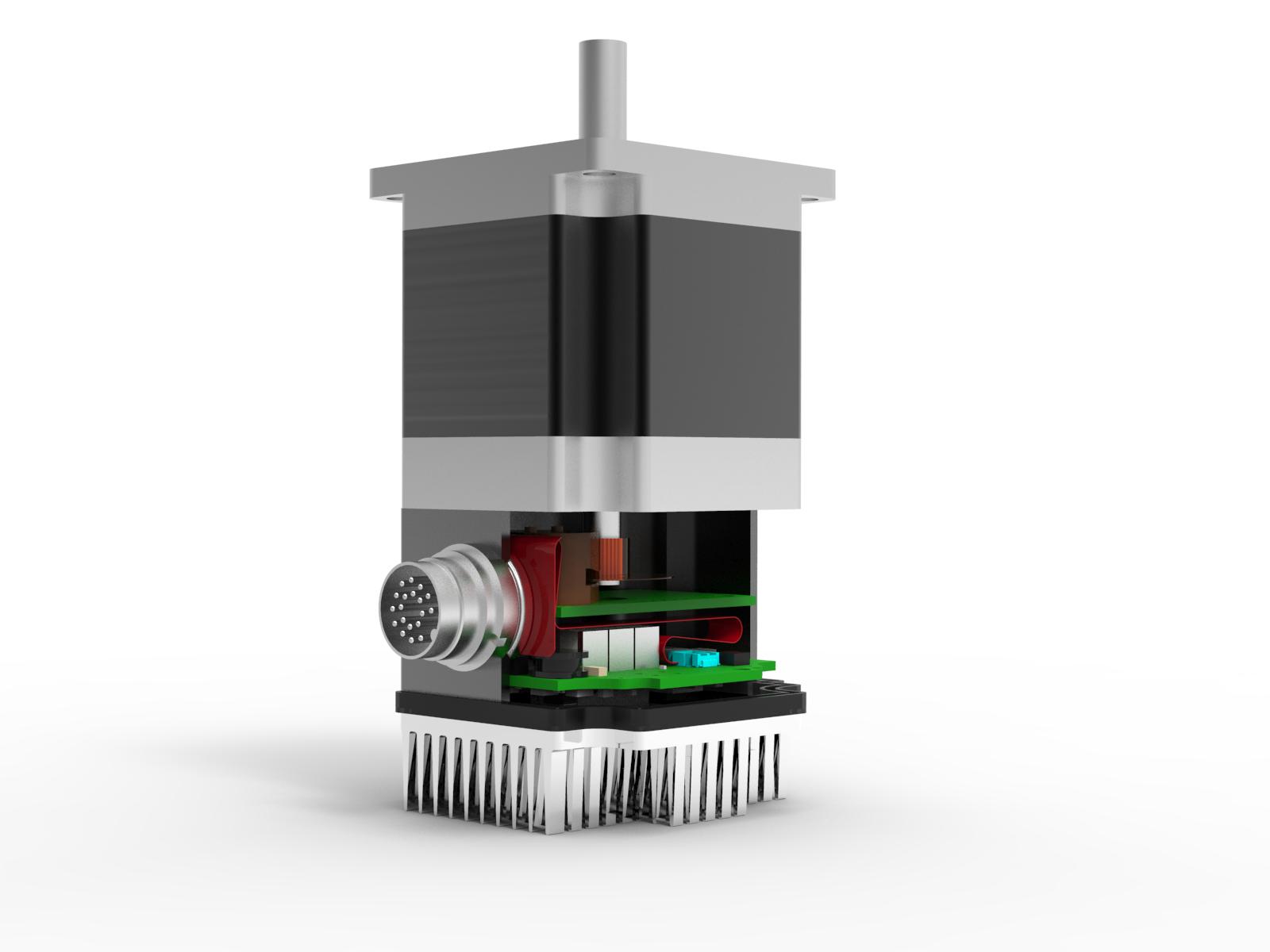
The Quicksilver system has been everything we expected. The code that runs on the controllers is easy to write and very powerful, despite being low level. We have an excellent system to toggle between Remote Control and Robotic Drive that is all handled in the motor controllers. Physically, the motors exceeded expectations in terms of robustness, as team members have been known to ride the vehicle around campus, sometimes two people on the vehicle at once.” As shown in the figure, the QuickSilver Controls high pole-count servomotors and controllers combine to provide high efficiency over a wide range of speeds. The efficiency charted is the shaft output mechanical power divided by the DC input power. Average efficiency is 76% at 200
RPM to 2000 RPM for the QuickSilver 34-3 motor used in the application. Due to unique torque curves, the output power remains near maximum over a wide range of shaft speeds. Power is greater than 420W from 400RPM through 2000RPM, averaging 550W over that same range. In the Quicksilver application, there’s more torque at low speed, eliminating the need to constantly shift gears.
This improves efficiency and results in a more even distribution of power. The QuickSilver motors meet the torque needs of remote vehicles that must navigate around obstacles and climb up stairs used for search-and-rescue missions. The added torque helps the vehicles in steep ascent applications while providing the needed speed to navigate hallways. The low-speed, high-torque region transitions over to the nearly “constant power” region at a fairly low speed, allowing access to full power from the motor at a much lower speed than is possible for motors with flat torque curves. Operating the motor in this way provides approximately four times the output power at 500 RPM, as it would for a flat torque motor with the same output power rating at 2000 RPM. For vehicle use, this essentially provides “gearless shifting” with higher torque available at the low speeds, while also providing almost the same power level for high-speed operation. Graphs are typical measurements for the QCI- A34HC-3 paired with a QCI-N3 series controller operating at 48V. This accentuated low speed torque aids in climbing over obstacles and pushing through barriers without the need to change gears.
The use of distributed control provided by the intelligent controller offloads the motion related hard real-time computations, being updated at 120-uS intervals from the lower speed operations of the navigation computer while also providing onboard diagnostic capability. Digital control to the controllers is provided via a serial link to control the speed and/or position of the motor shaft. Analog control may also be selected via the serial link or by the onboard user program.
Related Posts
Operational Advantages of Integrated Motors
Operational Advantages of Integrated Motors Interesting Projects Blog April 17 2024 | Donald P. Labriola PE Combining a motor with
Integrated Hybrid Servo Motors Vs Standard Integrated Servo Motors
Integrated Hybrid Servo Motors Vs Standard Integrated Servo Motors Interesting Projects Blog April 10 2025 | Donald P. Labriola PE